
博世站台征程6 地平线狂揽Tier-1巨头合作
2023广州车展期间,智能驾驶计算方案提供商地平线宣布征程6系列芯片将于2024年4月正式发布。
尽管本次并非征程6的正式发布,地平线仍披露了产品的部分信息:征程6基于统一的BPU纳什计算架构而来,是业界首款能够覆盖从低到高全阶智能驾驶需求的系列车载智能计算方案。其中,征程6旗舰专为新一代城区高阶智驾而生,算力高达560 TOPS,对BEV、Transformer等先进模型的支持效率业界领先。

比起产品性能的升级,更值得注意的是,一场小范围的预热活动,竟有比亚迪、广汽集团、大众汽车集团旗下软件公司CARIAD、博世等汽车领域头部企业为之站台。
几家公司里,Tier-1巨头博世与地平线的合作是首次公开。

不知不觉间,地平线征程生态已集齐博世、采埃孚、大陆集团3大Tier-1巨头,此外还有TOP10级别的安波福。而在今年之前,根据地平线的公开信息,合作的只有大陆一家。
怎么忽然之间,国际Tier-1巨头们都相中了地平线?

第一,地平线的产品正在成为市场的主流选择。
2020年,地平线征程2芯片搭载于长安UNI-T量产上市,实现了中国车规级智能芯片前装量产零的突破。2022年,地平线征程5芯片搭载于理想L8量产上市,实现了中国百TOPS大算力车规级智能芯片前装量产零的突破。
从零的突破到成为市场主流,地平线的商业化进程不可谓不快。根据地平线提供的数据,地平线征程系列芯片累计出货量已达400万片,其中征程5出货量突破20万片。根据高工智能汽车研究院数据,2023年上半年NOA计算方案市场,地平线与英伟达市场占比超过八成,成为高等级自动驾驶芯片的两强选手,且地平线NOA车型搭载数量位居行业第一。在L2 ADAS一体机市场,地平线也与博世、Mobileye共同占据超八成市场份额,位居行业前三。

对于国际Tier-1而言,强强联合是水到渠成的选择。
第二,围绕征程芯片,地平线建立了国内最大的智驾软硬件生态。
地平线将智能汽车视作PC和手机之后的下一代计算平台,因此格外注重生态系统的建设。关于地平线在生态建设上的推进方向,大致可用3个词来概括。首先是“开放”,通过开放的商业合作模式,无论车企是通过Tier-1间接合作,还是车企自研智驾系统,乃至向车企开放芯片IP授权,地平线都能够支持,因此生态能够广泛连接产业链上下游伙伴。其次是“支持”,通过构建以“芯片+工具链”为核心的高效开放技术平台,打造国内最为完整成熟的智能驾驶开发环境,地平线为生态伙伴的开发工作提供了有力的支持。最后是“结网”,通过推动软件货架模式落地,使生态伙伴在地平线的平台上形成紧密的协作关系,让有独特长板的软件算法公司在生态内扎根。

相比于技术领先的短暂窗口期,产业链生态才是地平线真正意义上的护城河。以智能驾驶系统的复杂程度,一家Tier-1在各个模块都领先已难以实现,大包大揽的时代一去不复返。生态外玩家,难以凭借一己之力构建起成本更低、效率更高的上下游网络,更难以复刻生态内拼图式的创新涌现。因此,哪怕是Tier-1巨头,拥抱成熟生态也是成本效率的更优解。
第三,中国是全球车企智能化竞争的前沿,也是自动驾驶创新的策源地。
国际车企和Tier-1在中国市场,都需要本土化的创新研发。博世,有“根植本土,服务本土”的理念;采埃孚,“开发、创新、生产、投资,在中国,为中国”;大陆集团,有“扎根市场,服务市场”的中国本土化战略……
地平线近两年在中国智能汽车市场和产业链展现出的巨大优势,无疑会受到国际车企和Tier-1的高度关注,合作在某种意义上也成了必选项。
如今,日益走向主流的地平线,正快速摆脱创业公司的标签。尽管地平线成立时间不过8年,但在这个快速变化的市场,智能汽车行业“最大公约数”的图景,已相距不远。
来源:业界供稿
好文章,需要你的鼓励

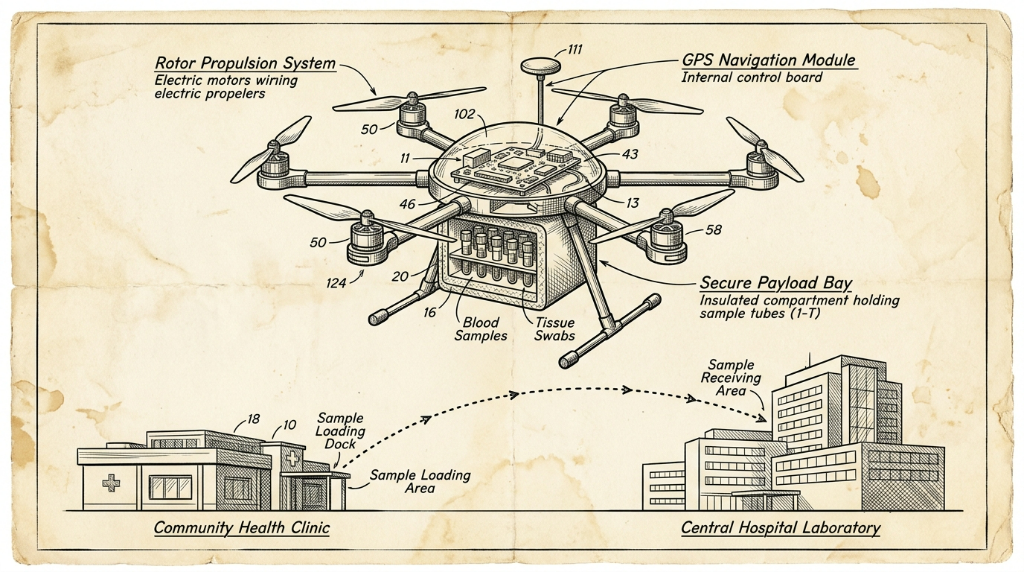
英国NHS无人机快递医疗样本服务正式落地伦敦
英国国家医疗服务(NHS)正将无人机纳入常规医疗物流体系。自今年2月起,无人机每天在雷恩斯公园和圣乔治医院之间运送血液等诊断样本,飞行仅需3分钟,比公路运输快约85%,且碳排放减少高达98%。目前已有逾2000名患者受益。NHS计划将该服务扩展至圣赫利尔、克罗伊登等多家医院,最终惠及约180万名患者。该网络由英国医疗初创公司Apian与谷歌旗下Wing合作运营。
Explyt团队打造的代码智能体评测新标准:光靠“通过/失败“根本不够用
AgentLens是Explyt公司联合俄罗斯学术机构开发的AI编程助手评测基准,通过分析完整人机交互轨迹而非仅看最终结果,从五个维度评估代码智能体的真实表现。
Aetina宣布支持英伟达Jetson T3000和T2000 AI模块
边缘AI计算厂商Aetina宣布,将在其DeviceEdge AIE-KT风冷系列和新款AIE-PT无风扇平台上支持英伟达全新Jetson T3000和T2000模块。T3000基于Blackwell GPU,最高提供865 FP4 TFLOPS算力,功耗70W;T2000则提供400 FP4 TFLOPS,面向视觉AI代理和自主移动机器人等场景。两款模块预计2027年第一季度上市,支持Nemotron、Cosmos 3等英伟达AI软件生态。
机器人的“触觉觉醒“:韩国梨花女子大学如何让小型AI模型在不忘记视觉的前提下学会“感受“材质
韩国梨花女子大学提出Splash框架,通过识别AI模型中的"休眠参数"并只在其中训练触觉能力,让小型多模态AI在学会感知材质触感的同时,完整保留原有视觉语言推理能力。
2023
11/27
10:23
分享
点赞

WAIC2026 现场直击:开普勒顶流人气王,麒麟系列火爆出圈
面壁智能将密度定律带入具身智能
龙磁科技拟投3.58亿元扩建越南永磁铁氧体基地
首创一层Scale-up网络256卡全互联,摩尔线程MTT C256超节点为万卡及十万卡级集群夯实底座
从高血压诊疗入手,北京安贞医院让医疗大模型走出聊天框
西门子肖松:以场景为牵引,推动工业AI从单点实效迈向生产力跃迁
打造Token极致性价比 新华三震撼亮相2026世界人工智能大会
机器人管家系统上线!傅利叶携多款康养陪伴新品方案亮相WAIC 2026
赛那德“ 自主作业机器人天团” 登陆 WAIC:iLoabot-X+模型双升级,秀出具身场景落地硬实力
西门子Eigen工程智能体中国首发首展,荣获2026 WAIC SAIL之星奖
NVIDIA Cosmos 推动物理 AI 前沿发展
PPIO亮相WAIC 2026:发布智能模型网关,打造面向Agent时代的智能Token工厂
