
华为中国合作伙伴大会2024 | 持续构筑竞争力,携手伙伴共创行业感知新未来
3月14日至15日,以“因聚而生 数智有为”为主题的“华为中国合作伙伴大会2024” 在深圳隆重举行。华为行业感知携手伙伴共同探讨“伙伴+华为”体系的数智化升级,并全面展示面向行业、商业、分销市场的场景化解决方案和适销新品。
持续构筑竞争力
携手伙伴共创行业感知新未来
在15日的2024年华为行业感知合作伙伴大会答谢晚宴上,华为行业感知领域总裁杨曦在“持续构筑竞争力,携手伙伴共创行业感知新未来”的主题演讲中提到,2024年华为将继续聚焦优势场景,发挥优势能力,打造端边云智能协同的行业感知。
• 聚焦场景:联合解决方案伙伴打造13大基线方案+53子场景解决方案,让方案可闭环、可兜底、可复制,让销售伙伴放心卖。
• 构建优势:通过光产品线能力的加持,聚焦产品体验、质量和商务,全面提升产品的技术竞争力和商务竞争力,让产品好用、易用,让伙伴做得有底气。
杨曦介绍,基于在视频和AI领域多年的技术积累和沉淀,华为行业感知在城市道路、高速公路、森防、水利、园区、分销等场景打造出多款重磅产品和亮点方案。

华为行业感知领域总裁 杨曦
此外,在数字政府应急行业论坛上,华为联合伙伴共同发布了森林防火解决方案。
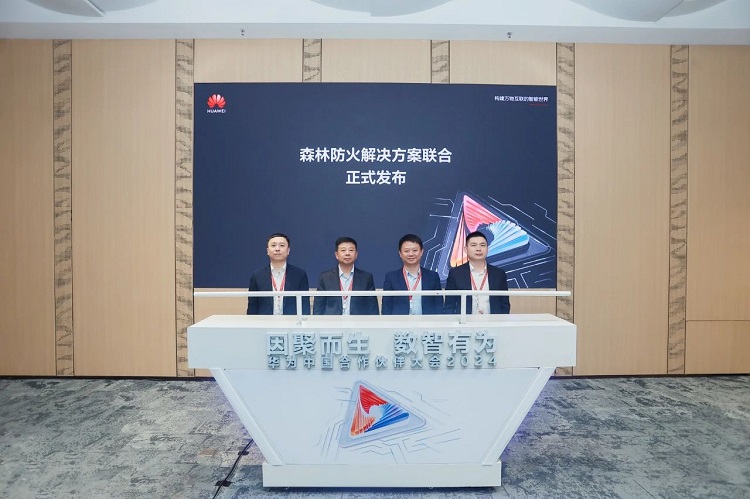
森林防火解决方案联合发布
未来,行业感知将在加强伙伴支撑体系上下功夫,积极携手合作伙伴,大力发展合作伙伴,深化伙伴的合作深度与广度,与合作伙伴一起共赢广阔的产业数字化蓝海。
随后华为中国政企行业感知总经理胡振宇在以“因聚而生 数智有为 携手并进 共赢千亿商机”为主题的发言中补充到,2024年行业感知将加大伙伴激励投入,鼓励老伙伴持续深耕,做大做强,同时降低门槛,欢迎更多的新伙伴加入。
针对分销场景,将从补齐产品款型、增加营销活动、严抓市场乱价、打造标杆金牌四个切口,提升伙伴和渠道出货。

华为中国政企行业感知总经理 胡振宇
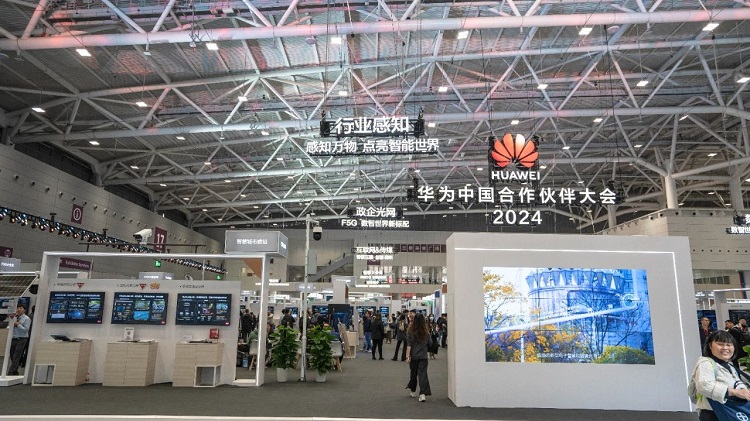
五大展区,场景化深度体验
行业感知展区以“感知万物 点亮智能世界”为主题,展示了涵盖智慧城市、智慧交通、智慧园区等多元化的场景解决方案,吸引了众多团组和现场观众参观互动。
智慧城市感知
无论智慧城市如何发展,最终的落脚点都是为“人”服务。四川绵阳交警采用AI超微光摄像机+多合一智能补光灯的机动车违章治理方案,有效解决光污染问题,大幅提升了群众满意度。
同时,针对非机动车治理、车辆违停治理、城市道路治安管理、森林防火管理、智慧水利检测等场景,行业感知充分利用自身的硬核技术能力,聚焦场景化解决方案,携手合作伙伴共创客户新价值。

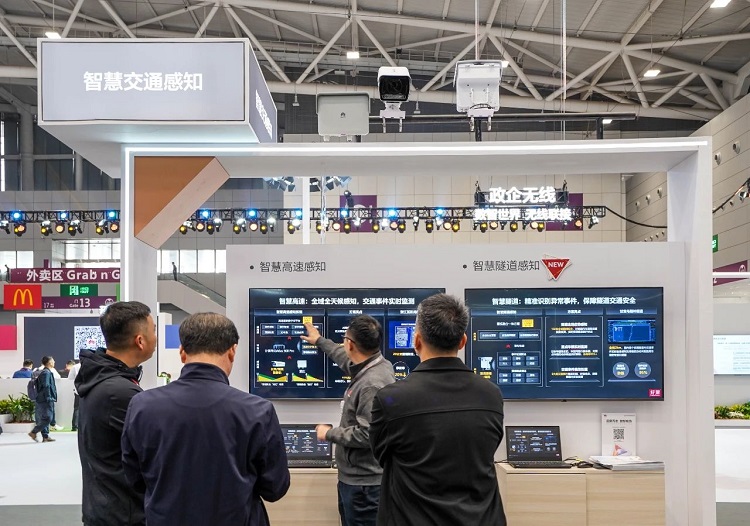
智慧交通感知
交通是现代城市的血脉。血脉畅通,城市才能健康发展。因此,针对交通拥堵这项“城市病”,华为行业感知由点到线再到面打造了全息路网感知解决方案,充分释放视频和雷达感知的融合、倍增效应,实现对路口、路段交通参与者的全天候感知、精准控制、高效治理,有效提升道路通行效率,让城市充满流动的“智慧”。
观众还可以和展台中的交通沙盘进行互动,更加直观地了解行业感知的全息路网、智慧高速和智慧隧道解决方案。
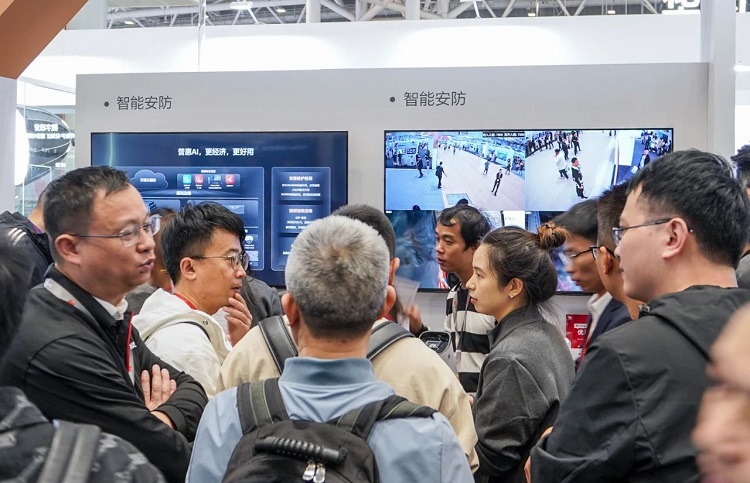
智慧园区安防
在智慧园区安防展台,华为和合作伙伴联合展示了端到端闭环的智慧园区、智慧校园、智慧社区、智慧连锁等综合安防解决方案,通过电瓶车禁入电梯、高空抛物、周界入侵等多样智能算法,助力实现公共安防从被动应付向主动保障、从传统人工向现代智能的转变。

华为坤灵
针对中小企业的数字化转型,华为坤灵提供了适合分销市场的D系列摄像机、NVR等易装易维、易学易用的设备,为中小企业办公、民宿/酒店、中小门店等典型场景提供多业务融合的解决方案。
光视融合
华为融合视频+光纤感知,为油气、管道、机场等各种复杂周界场景构建“零漏报、低误报、全天候、全覆盖”的防护检测能力,构筑全面安全的智能周界防护方案。
面向未来,华为将秉持“因聚而生 数智有为”的核心理念,不断强化“伙伴+华为”体系,和伙伴共同营造开放包容的合作环境,共同激活创新引领的合作动能,共同开创互利共赢的合作局面,助力客户数智化升级。
来源:业界供稿
好文章,需要你的鼓励


维科精密泰国基地启动小批量生产,3.10亿元加码汽车电子精密部件
今天讲的出海案例是维科精密,这家汽车电子与功率半导体精密部件厂商正在泰国建设总投资3.10亿元的生产基地。

AI代码修复工具真的需要每次都“跑一遍程序“吗?北航等机构的最新研究给出了颠覆性答案
研究发现AI代码修复工具默认的"写代码→跑测试→再改"流程中,禁止运行测试几乎不影响修复成功率,却能节省超过一半的时间和费用。

pgEdge推出ColdFront,加入OLTP与OLAP融合赛道以支持AI应用
随着AI智能体对实时数据访问需求激增,企业维护独立事务与分析系统的成本和复杂性日益凸显。Databricks、Snowflake、EDB等厂商纷纷推出融合架构。分布式PostgreSQL提供商pgEdge近日发布ColdFront测试版,采用冷热数据分层架构,自动将旧数据迁移至Apache Iceberg对象存储,同时保持PostgreSQL作为唯一应用接口。分析师指出,DuckDB正成为此类架构的事实标准嵌入式分析引擎,但由此产生的集中风险值得CIO关注。

北京航空航天大学研究团队揭秘:给AI代码助手加几行“路标注释“,导航效率提升了多少?
北京航空航天大学研究发现,向AI代码助手注入轻量级结构注释,可使Bug定位准确率提升2.2%,运行轮次减少1.6次,且运行结果方差减半。
2024
03/18
08:58
分享
点赞

pgEdge推出ColdFront,加入OLTP与OLAP融合赛道以支持AI应用
TabFM:面向表格数据的零样本基础模型正式发布
Netgear推出AI驱动网络管理平台,助力中小企业与服务商
旧笔记本、台式机与打印机该如何正确回收处理
美国NRC提出核废料处置新规,为长期搁置问题开辟出路
OpenClaw 智能体正式登陆 iOS 与 Android 平台
智引芯程,定义未来:德州仪器亮相 2026 慕尼黑上海电子展
“借道”MoP封装,AMD打破“存储墙”与“空间锁”
优必选万台超仿生人形机器人,要在今年进家庭?
Albertsons借助Databricks构建零售商品智能决策平台
微软正式将 Windows 11 打造为 AI 操作系统
工作中使用未授权AI工具之前,请三思
